Distributed coordination and control for multi robot system
My Work | | Links:
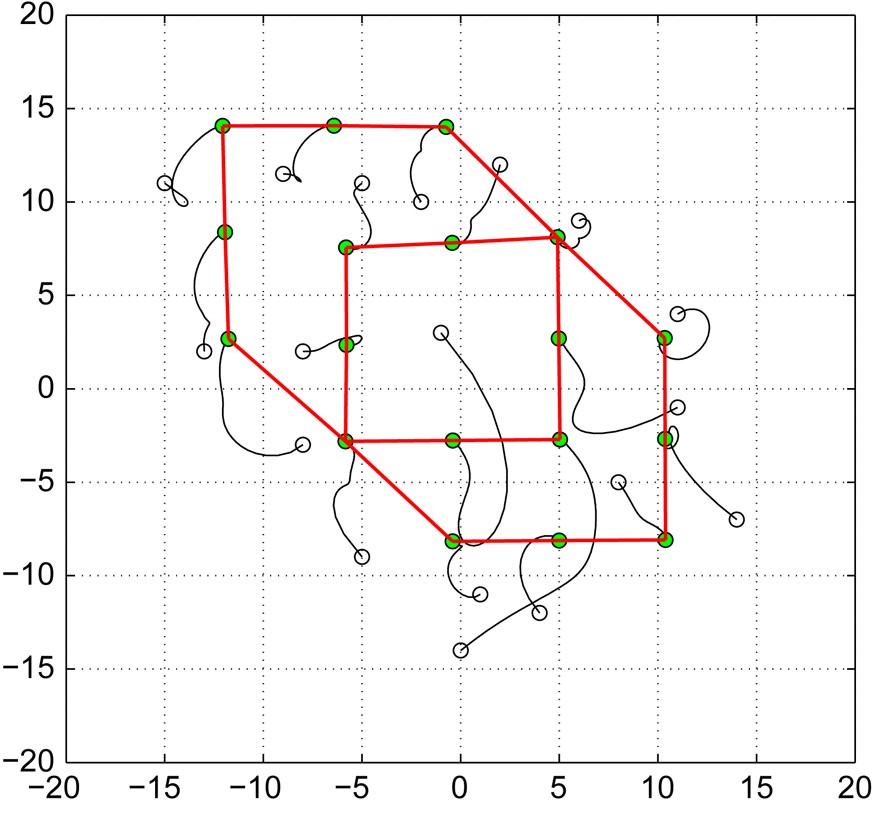
The project explores concepts of graph and set theoretic methods, Lyapunov-like stabilty analysis, non-smooth dynamical systems to develop an efficient unified framework for collision avoidance, coordination control and connectivity maintenance in multi-robot systems with limitations in communication and available sensor (local) information. The year long work is aimed to conceptualize a better and more generalized approach for formation stabilization, trajectory tracking and consensus controllers and test it through simulations and experiments on multi robot systems. Particularly, I am interested to exploit the concepts of set-theoretic methods to encode velocity and path constraints, bearing based approach to minimize the requirments of available information while ensuring its adherence to practical constraints of communication range and dynamical constraints of actual robots. Initial literature study has been completed focusing on graph & set theoretic methods, gradient & optimization based controllers, collision avoidance algorithms for multi-agent, distributed coordination and control in multi-robot formations. Most importantly, this work has motivated me to pursue a PhD in a similar line of work.
I will post further updates after completion of thesis.